
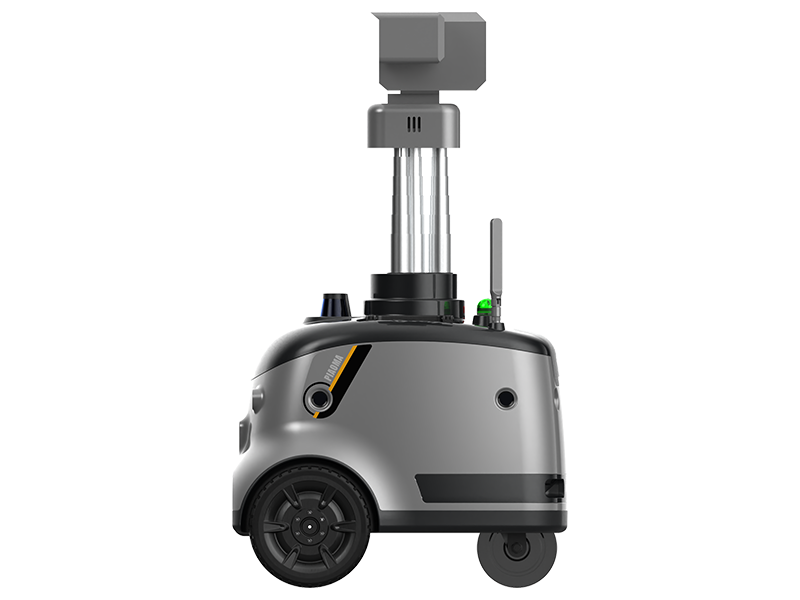







PMR-W1C
仿生操控机器人
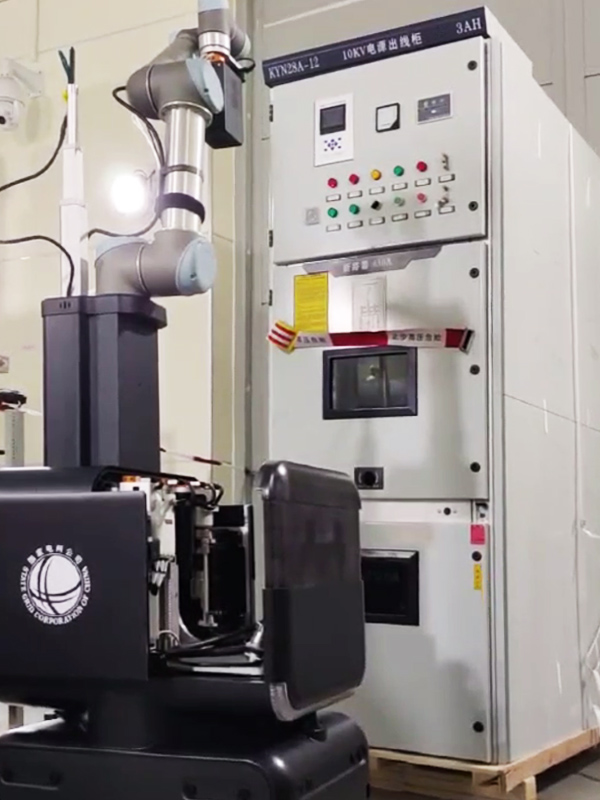
带电作业机器人搭载集成化机械臂模块,配备可自动更换操作作业工器具末端,运用视觉伺服等多原理技术;
通过计算机程序远程操控机器人完成常规操作作业任务,实现对各类电气设备运行状态及运行环境的综合智能检测。


功能特点
-

3D视觉识别
自主定位操作目标
-

操作灵活
六自由度机械臂,高低大跨度的开关操作任务
-

多传感器融合
手臂搭载局放,图像识别,红外热成像,局放传感器等系统,自主进行表计、温度、设备局部放电量等检测
-

远程控制
无需现场操作,通过远程控制系统,即可控制机器人完成分合闸及其设备的各状态切换
-

VR系统
结合人机协作的半自主控制模式,运用视觉伺服、柔顺控制、力觉反馈等多原理技术,实现通过计算机程序/远程遥操作来操作机器人完成常规操作作业任务
-

仿生系统
通过操作机器人的深度学习即可全自动录入需操作对象的操作动作
产品优势
-
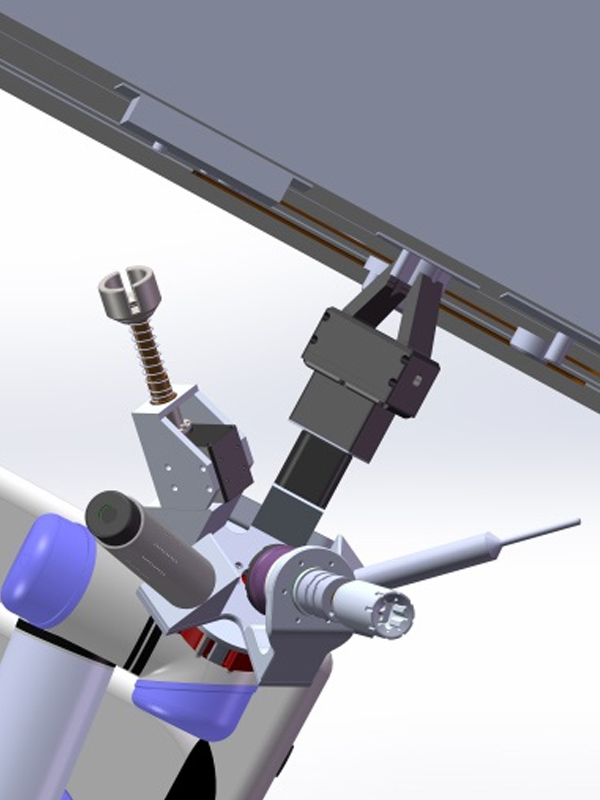
支持单臂灵巧手
单手具有6个自由度和12个运动关节,结合力位混合控制算法,具有亚毫米级定位精度和数千克的负载能力,可以模拟人手实现精准的抓取操作。
-
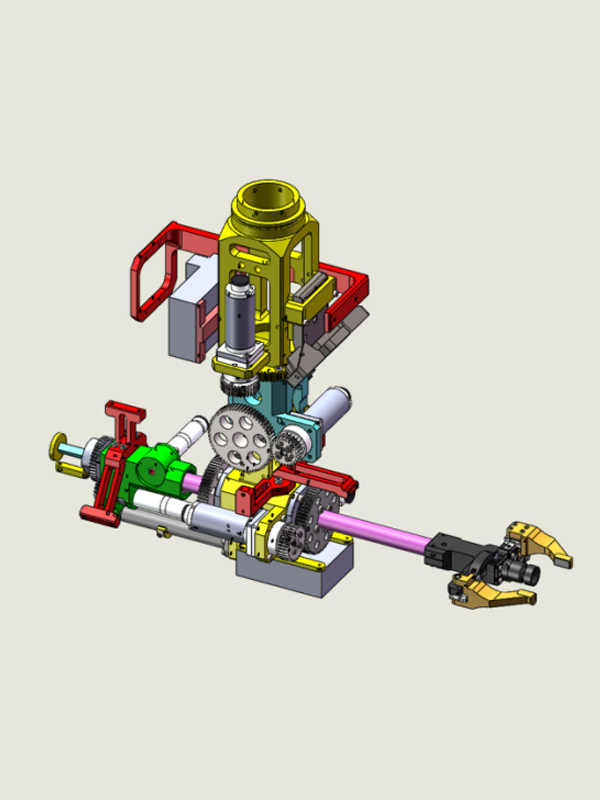
毫米级精确控制
采用3D导航技术自主定位操作目标,前馈PID+电压电流双闭环控制,通过模块化动力组件+6轴调姿+机构设计,可完成多种复杂操作动作整合,基于深度相机的视觉闭环校正+高精度调姿系统+机器学习算法,可确保操作精确定位。
-

多种末端操作工具
工具箱支持多个机械终端,可根据现场需求自动跟换机械终端,方便机器人在复杂环境下灵活作业。
-
长期稳定运行
采用经过严格测试和验证的零部件和材料,出厂前多次负载、冲击、速度、摆动测试,优化程序设计,支持 6 个月以上稳定运行,不宕机、不关机、无严重故障。
- 上一个:没有了!
- 下一个:带电操作机器人(一代)
 返回列表
返回列表

